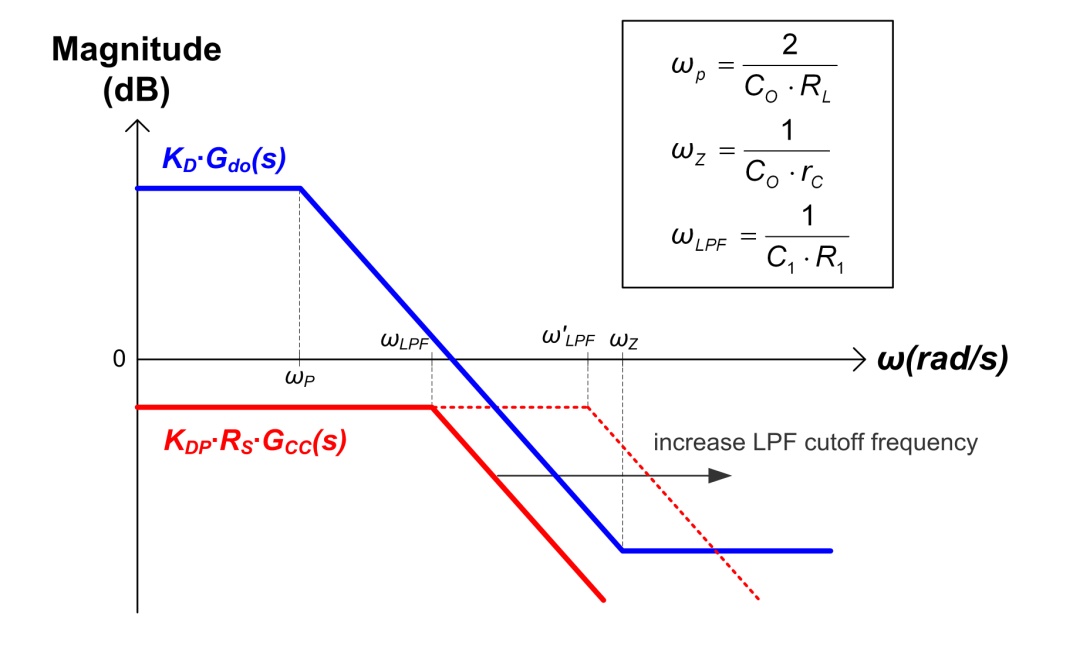
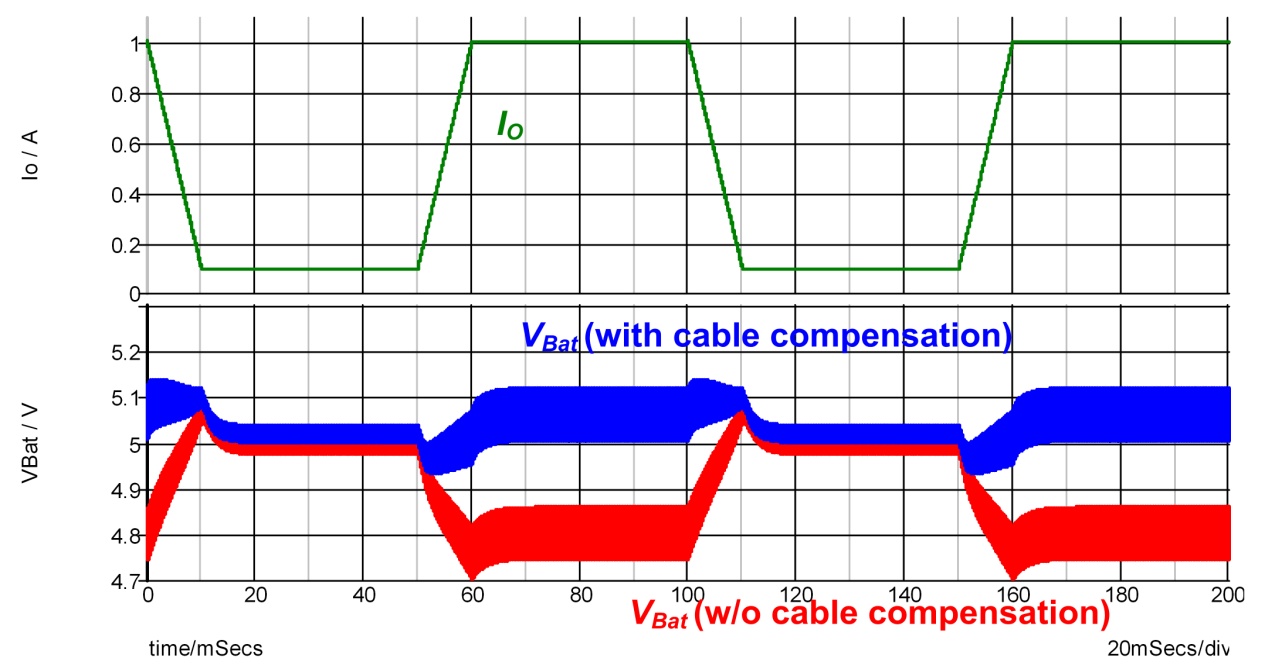
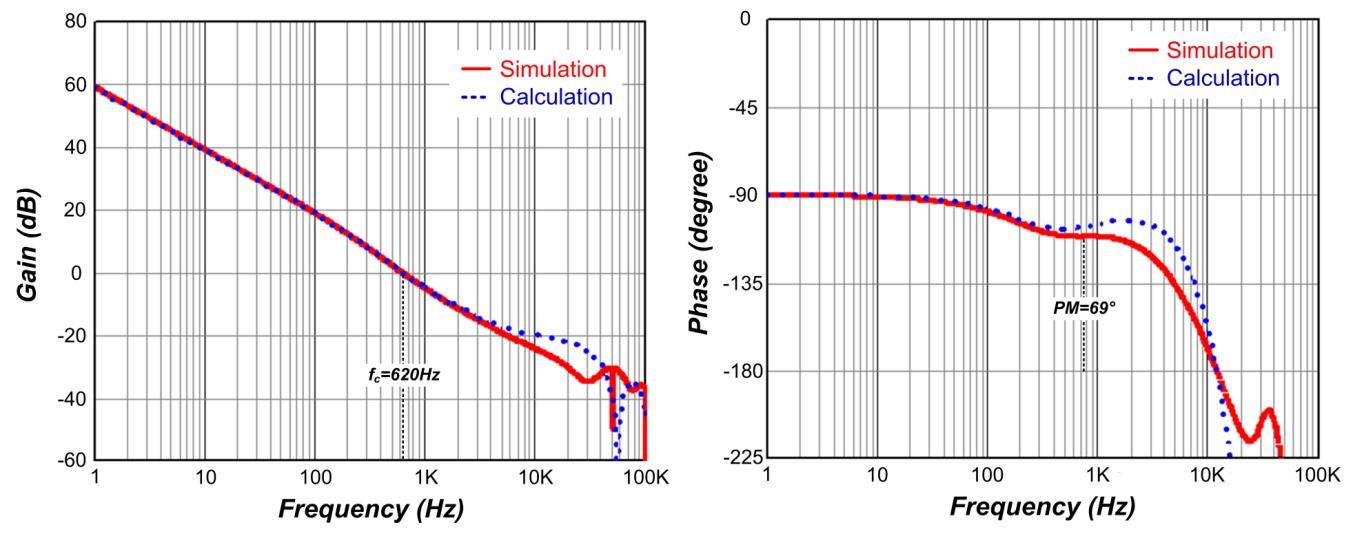
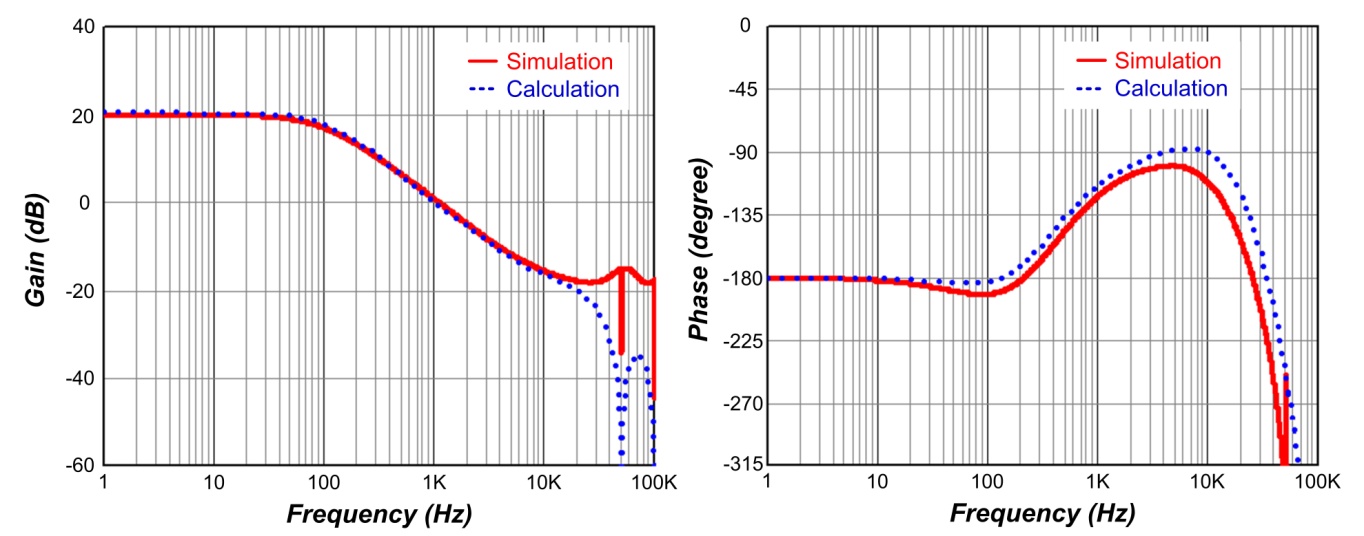
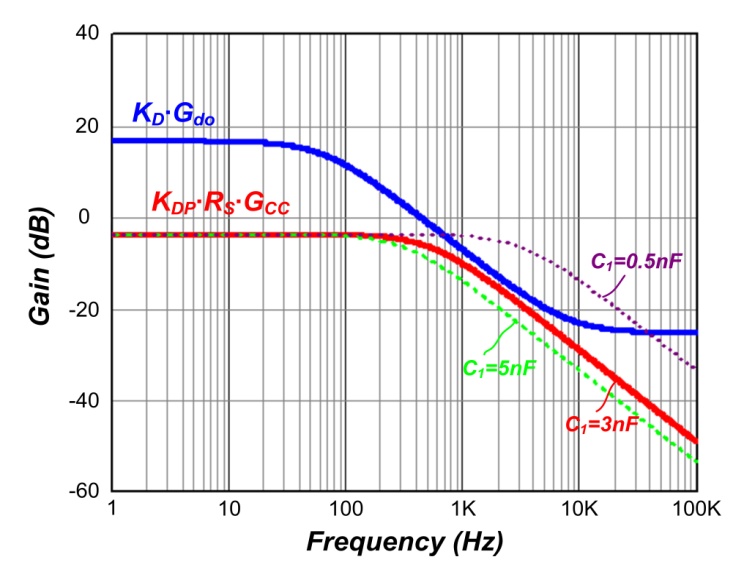
图五、KDP∙RS∙GCC 和 Gdo∙KD 的曲线图 4. 电路仿真验证以电路仿真来验证理论分析结果,所用参数列于下。VIN = 156V,VBat = 5V,IO = 1A,LM = 1.5mH,CO = 1mF,rC = 20mΩ,RS = 4.5Ω,Rcable = 240mΩ,NP : NS : NA = 15 : 1 : 1.4,fS = 50kHz,VREF = 1.2V,gm = 100μA/V,Rcomp = 215kΩ,Ccomp = 12nF,Ra = 29kΩ,Rb = 6kΩ,R1 = 100kΩ,C1 = 5nF 且 KCC = 400m。图六同时显示有缆线补偿和没有缆线补偿的模拟波形图,在不同的负载条件下,缆线补偿都适当地提供一稳定之充电电压。图七和图八分别显示回路增益 T1 和 T2。由图可知,电路仿真结果与分析计算结果非常吻合,系统的带宽和相位裕量是由回路增益 T1 决定,且由图八可知回路增益 T2 是正反饋。图九显示的是输出阻抗,它在低频的增益接近于 Rcable,不过相位是从 180° 开始,也就是它提供了负阻抗以有效抵消缆线阻抗。
图六、有缆线补偿和没有缆线补偿的模拟波形图
图七、回路增益 T1 的波德图
图八、回路增益 T2 的波德图
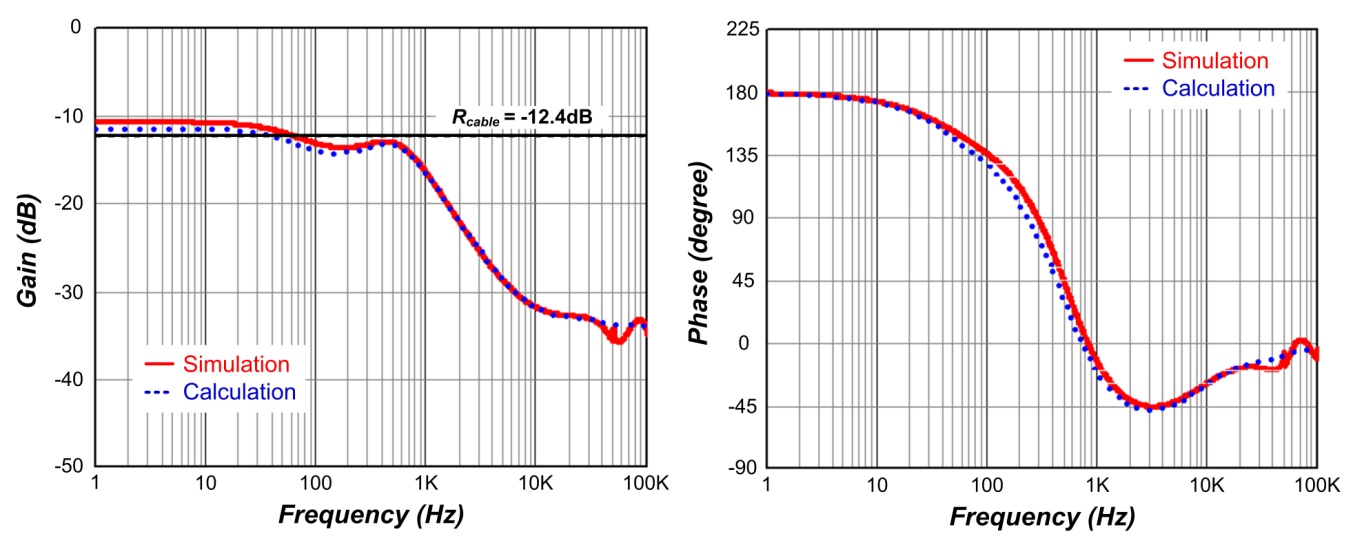
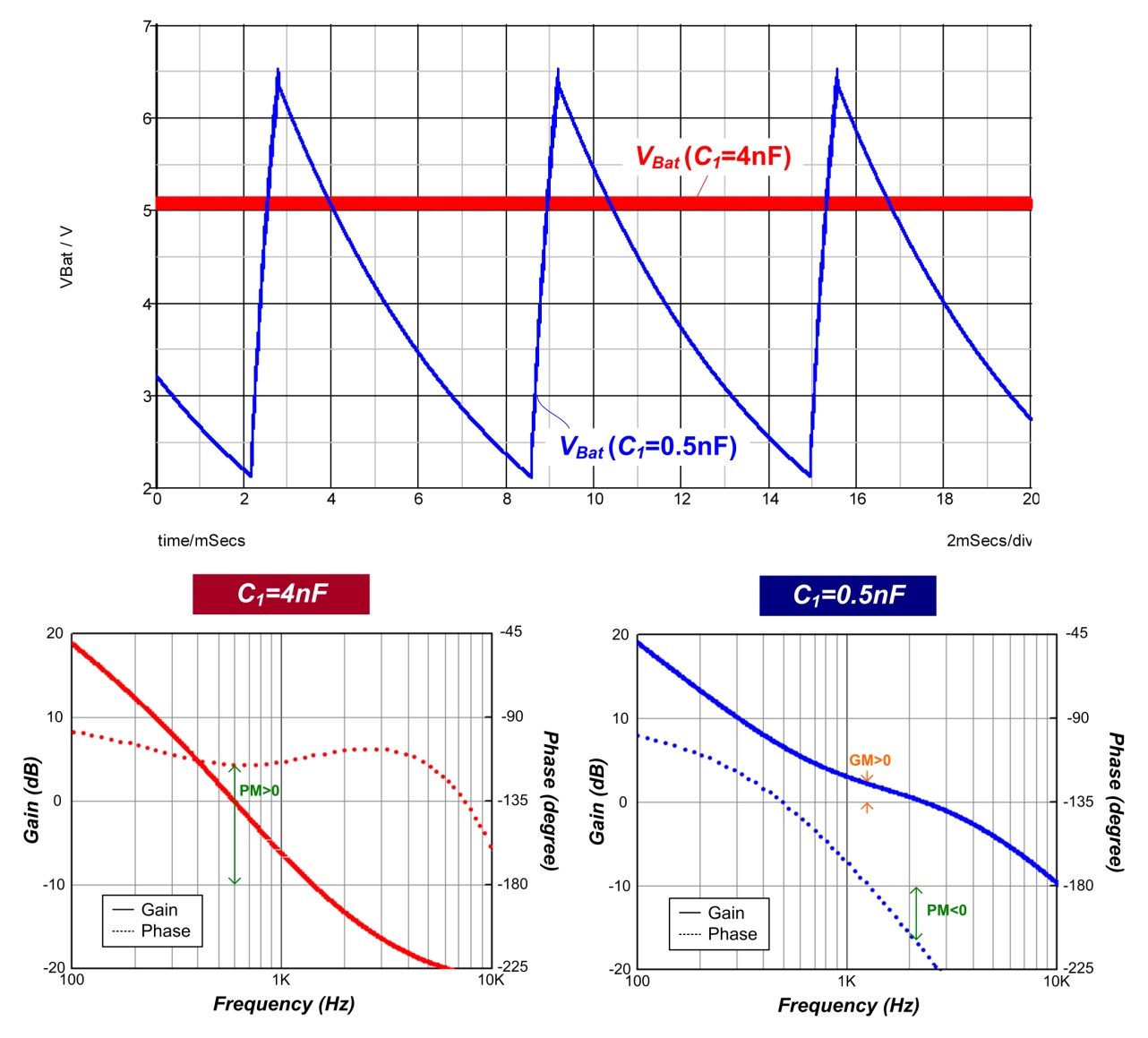
图九、输出阻抗的波德图 图十显示分别在不同的 C1 值而产生不同的 LPF 截止频率之下,输出电压仿真波形与回路增益 T1 的计算结果。从结果发现,C1 容值小而让 LPF 截止频率变高会造成系统不稳定,而根据前面回路增益 T1 的分析结果,此不稳定的现象也可从其增益余量或相位余量得到预测。所以,当 R1 恒定时,可由 KDP∙RS∙GCC 和 Gdo∙KD 的波德图来决定让系统稳定的最小电容 C1。图十一显示 KDP∙RS∙GCC 和 Gdo∙KD 的波德图在不同 C1 状况下的表现,由该图可发现 C1 至少须大于 3nF 才能使得 KDP∙RS∙GCC 永远小于Gdo∙KD。经过电路仿真可知让系统稳定的最小 C1 值为 4nF,这验证了上述分析的结果。 图十二显示在各个不同 C1 值时,回路增益 T1 的带宽和相位裕量图形。由图可知,当 C1 值较大时,系统会有较高的带宽与相位裕量;但是,当 C1 超过某一定值后,系统效能无法再有显著的改善,只是付出不必要的成本而已。由此可知,本文所提出的小信号分析方法,能为反饋设计提供有效的帮助。
图十、在不同 C1 值下,充电电压 VBat 的电路仿真波形图和回路增益 T1 的计算结果。
图十一、不同 C1 值时 KDP∙RS∙GCC 和 Gdo∙KD 的图形
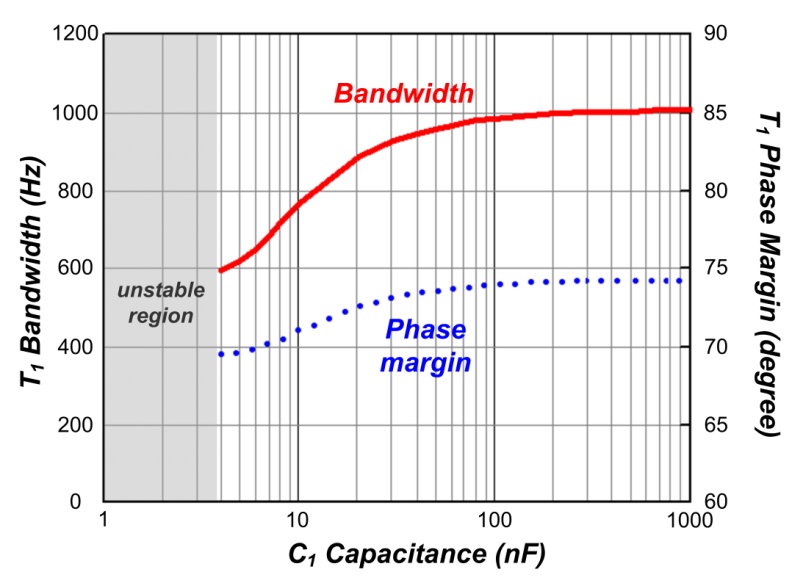
图十二、不同 C1 值下,回路增益 T1 的带宽与相位裕量的图形 5. 总结本文提出了一个应用在 PSR 反激式转换器上的缆线补偿方式以解决在电池充电器应用中的因缆线阻抗所造成的电压降问题,其中提出的小信号模型为进行缆线补偿设计提供了小信号分析及反饋控制设计的完整而详尽的工具,而分析的结果,也经由电路仿真得到有效的验证。 |