(1) 由于dsPIC是一种定点控制器,因此不能直接在代码中使用电机参数,因为它们是 小数数据。 因此,我们 必须将物理 单位转换为 定点 PU 格 式(主要是 Q15 )。 “tuning_params.xlsx”用于实现这种转换。“tuning_params.xlsx”文件中有多个参 数,具体说明如下。
表4-1“tuning_params.xlsx”中的参数类型
类型 | 属性 | 标记 |
| 输入 | 硬件板参数的物理单位。 |
| 输入 | 电机参数的物理单位。 |
| 输出 | 定点格式的开发板和电机参数。在 “xxxx_parms.h”中设置该常数。 |
| 输出 | 定点格式的启动算法参数。在 “startup_params.h”中设置该常数。 |
其他 |
| 临时计算数据。 |
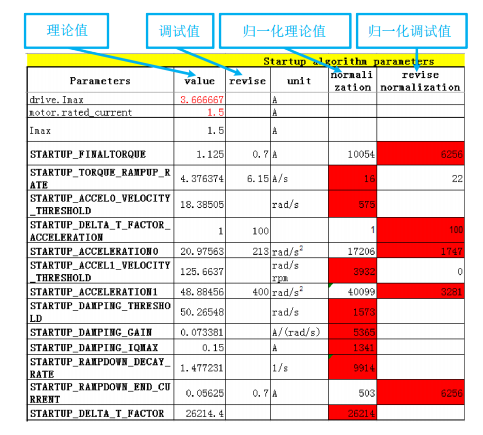
要获得定点参数,应按如下所示在“tuning_params.xlsx”中输入电机参数。
随后将在紫色背景单元格中生成定点格式的值。为避免Q15实现引起的饱和、分辨率损 失和截断错误,建议定点数据应处于6000-26000范围内。如果定点数据超出建议范围
(大于26000),则应调整换算值“Q”以符合建议范围。
- 在C源文件“hal/opamp_comparator.c”中的寄存器CVR(CVRCON<3:0>)中修改过 流阈值。
- 在头文件“parameters/atpll_params.h”中修改估算器角度跟踪锁相环(Angle Tracking Phase-Locked Loop,ATPLL)的参数。
- 在头文件“parameters/fault_detect_params.h”中修改停转检测的软件过流阈值。
- 在头文件“parameters/motor_params.h”中修改电机参数。
- 在头文件“parameters/mtpa_params.h”中修改最大转矩/电流(Maximum Torque per Ampere,MTPA)算法的参数。
- 在头文件“parameters/operating_params.h”中修改电机速度参数。
- 在头文件“parameters/sat_PI_params.h”中修改速度环的PI饱和阈值。
- 在头文件“parameters/startup_params.h”中修改启动算法的参数。
(10) 返回第3章“设置和运行”,编程并运行代码。