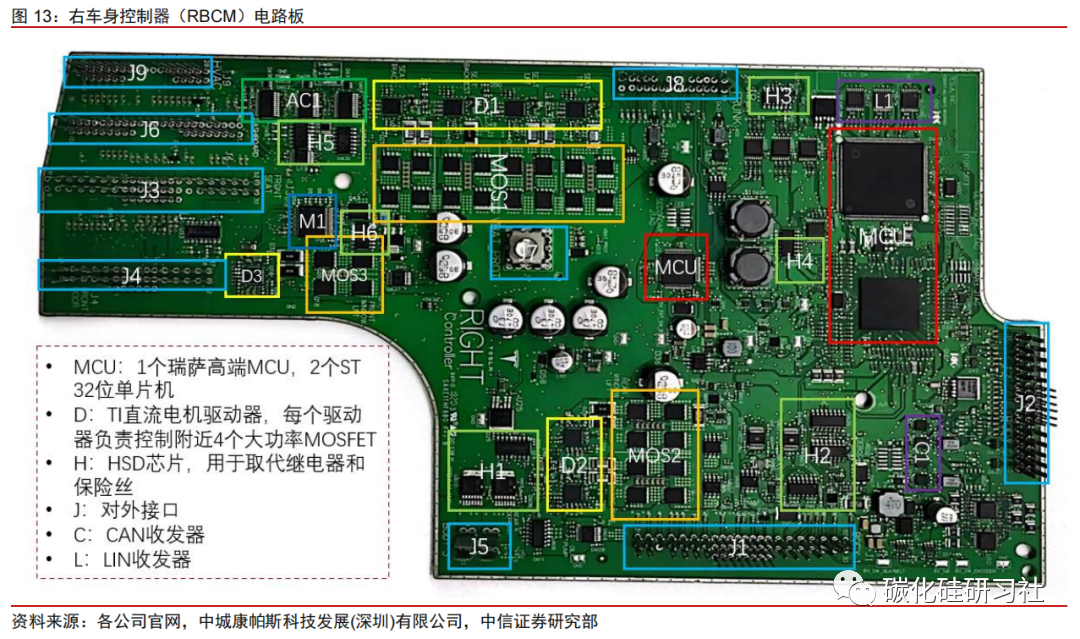
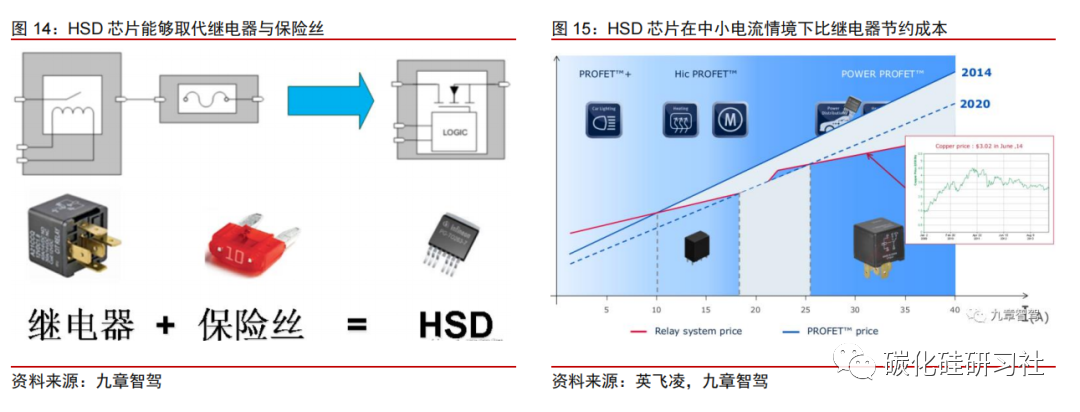
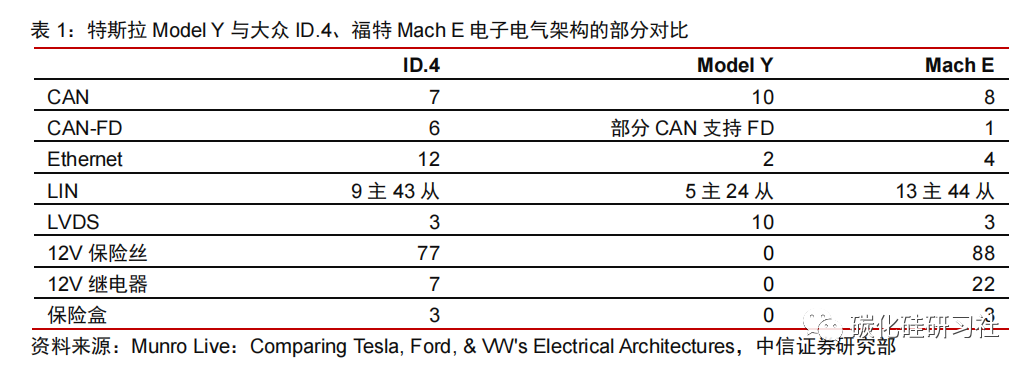
特斯拉车身域的思路:彻底地软件定义汽车,用芯片替代保险丝和继电器车身域是特斯拉相比传统汽车变化最大的地方,传统汽车采用了大量 ECU,而特斯拉通过三个域实现了对整车的一个控制。虽然都是往域控制器方向走,但特斯拉没有采用博世的功能域做法,而是完全按区域来进行划分,将硬件尽量标准化,通过软件来定义汽车的思路体现得淋漓尽致。除此之外,特斯拉还将一些电气化的部件尽量芯片化,如车身域中采用了大量 HSD 芯片替代了继电器和保险丝,可靠性提高,而且可以编程,能更好实现软件定义汽车。
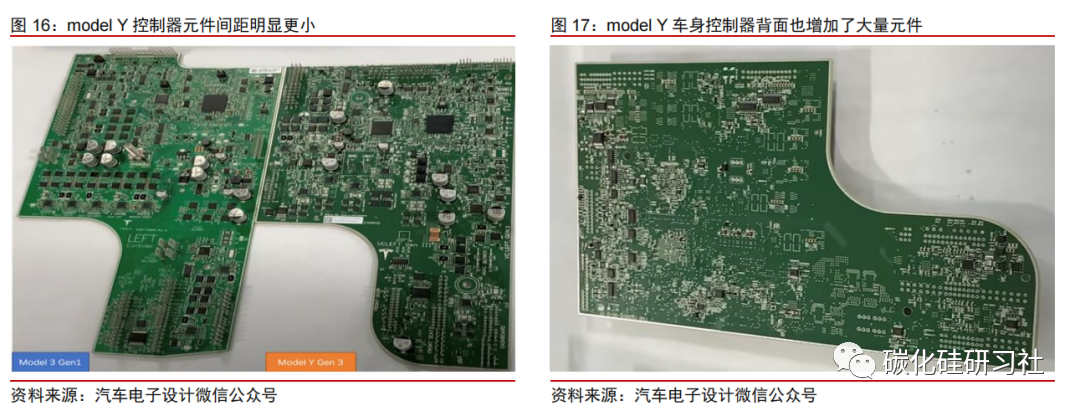
特斯拉控制器的未来走向:走向更高集成度,优化布置持续降本 从特斯拉车身控制器能够体现出的另一个发展趋势是器件的持续集成和持续降本。早期版本的 model S 和 model X 并无如此集中的车身控制器架构,但如今较新的 model 3 和 model Y 已经体现出集成度增加的趋势。左下图中我们可以看到,作为第三代车身域控制器产品,model Y 的车身控制器已经与第一代的 model 3 有所不同,直观上就是其元器件密度有所增加。比如图中的 MOSFET(黑色小方块),model Y 的间距明显要比 model 3更小。 因此,在同样的面积下,控制器就能容纳更多元件,融合更多功能。另外,与现有的 model 3 不同,model Y 控制器的背面也被利用起来,增加了一定数量的元器件,这使得控制器的集成度进一步提高。集成度提高的结果就是车身电子电气架构的进一步简化,汽车电子成本的进一步降低。
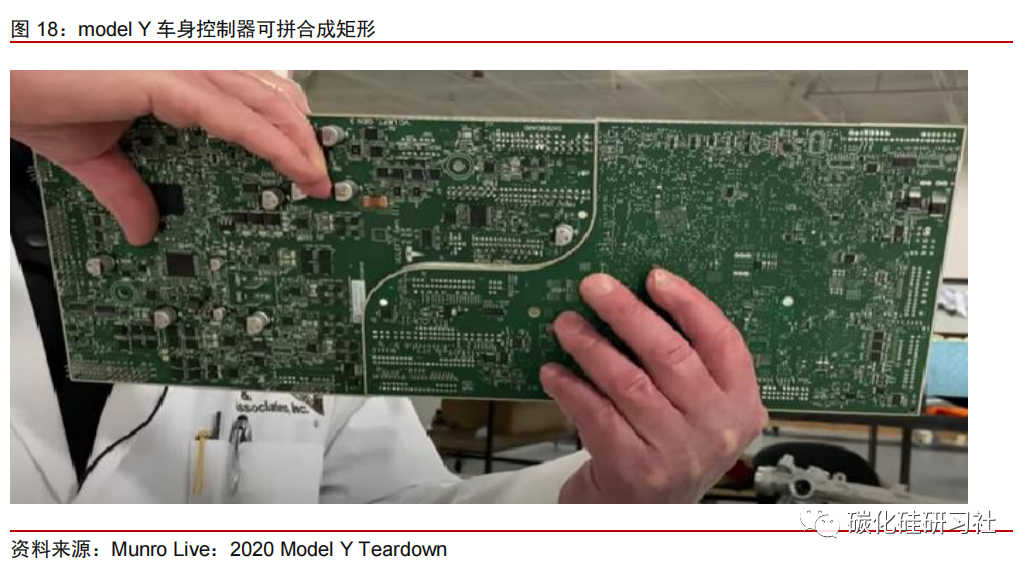
另外 2020 款 model Y 的 PCB 板也得到进一步节约。初代 PCB 板由于形状不规则,必然有一部分 PCB 材料被浪费,推高了成本。而第三代控制器的 PCB 形状能够紧密贴合,两个左右车身控制器可以合并成为一个矩形,因此 PCB 材料的利用率得到有效提升,也能够在一定程度上降低成本。
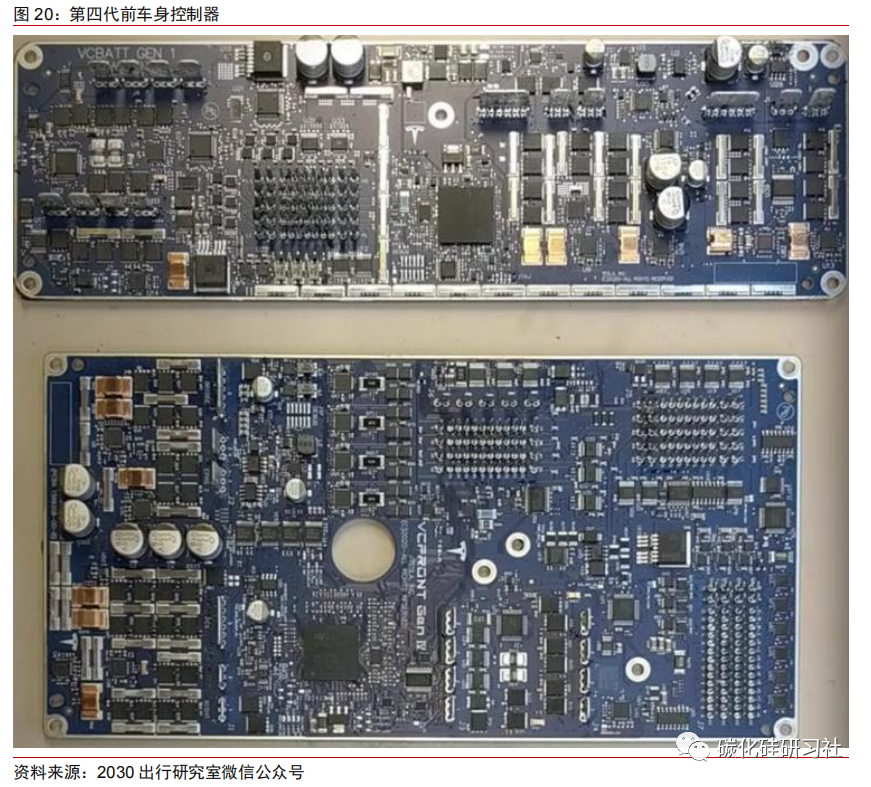
未来车身控制器会如何发展,是否会走向一台统一的控制器?至少目前来看,特斯拉用产品对此做出了否定的回答。我们可以看到,2021 年交付的 model S plaid,其第四代车身控制器仍旧使用了分离的两片左右车身控制器。
而且在第四代车身控制器设计中,前车身控制器也分成了两片,一片负责能量管理和配电,另一片负责车身管理、热管理以及少量配电工作。整体来看,第四代控制器的元件密度仍旧很高,体现出了集成降本的趋势。另外,第四代控制器的元件连接采用 Press-Fit技术取代了传统焊接,进一步提高了良率,也有利于实现更高的元器件密度。
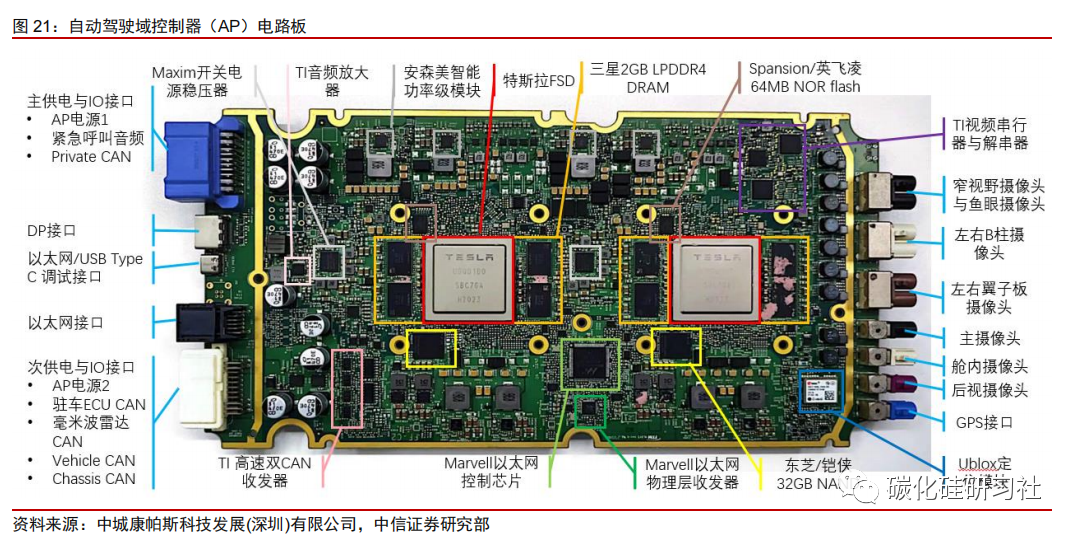
整体来看,统一的中央计算机虽然集成度高,但不可避免地带来了控制器和受控器件的距离增加,从而增加线束长度,提高成本,而且元件集成密度也有一定的限制,我们无法在有限的空间内无限制集成,因此集中化也是有上限和最优解的,目前看来特斯拉正逐渐改善设计和工艺来逼近这个最优解。 硬件方面的持续集成也为软件的集成和发展创造了条件。传统汽车产业链当中不同功能独立性很高,各功能的 ECU 都来自不同厂商,难以协同工作。但特斯拉将大量 ECU 集成后,车身上只需保留负责各个功能的执行器,而主要的控制功能都统一在域控制器中,采用少量的 MCU,更多使用软件来完成功能控制。比如特斯拉 model 3 的左右车身域控制器中各有 3 个 MCU,数量大大减少,不同控制功能采用软件的形式进行交互,能够有更大的协同创新空间。比如特斯拉可以协同全车空调出风口来调节车内风场,或对副驾驶座位上的乘客进行体重检测,判断其是否属于儿童,从而灵活调整安全气囊策略,而不是像传统车企一样只能让儿童坐在后排。而且特斯拉可以从软件控制当中收集数据,并持续不断改善控制功能,改善用户体验。 特斯拉这种软硬件持续集成的方案在带来优势的同时也对软件开发能力提出了更高要求。只有统揽全局软硬件方案、熟悉各个部件特性的整车厂商才有能力开发如此庞大复杂的软件系统,传统车企一直以来扮演集成商的角色,ECU 软件开发更多依赖供应商,其人才队伍构成和供应链方面的利益关系导致其短时间内难以模仿特斯拉的方式,因而特斯拉的车身控制软件也成为其独特的竞争力。 驾驶域:FSD 芯片和算法构成主要壁垒,NPU 芯片效率更优 特斯拉的另一个重要特色就是其智能驾驶,这部分功能是通过其自动驾驶域控制器(AP)来执行的。本部分的核心在于特斯拉自主开发的 FSD 芯片,其余配置则与当前其他自动驾驶控制器方案没有本质区别。 在 model 3 所用的 HW3.0 版本的 AP 中,配备两颗 FSD 芯片,每颗配置 4 个三星 2GB内存颗粒,单 FSD总计 8GB,同时每颗 FSD配备一片东芝的 32GB闪存以及一颗 Spansion的 64MB NOR flash 用于启动。网络方面,AP 控制器内部包含 Marvell 的以太网交换机和物理层收发器,此外还有 TI 的高速 CAN 收发器。对于自动驾驶来说,定位也十分重要,因此配备了一个 Ublox 的 GPS 定位模块。 外围接口方面,model 3 整车的所有摄像头都直接连接到 AP 控制器,与这些相机配合的还有 TI 的视频串行器和解串器。此外还有供电接口、以太网接口和 CAN 接口使得 AP控制器能够正常运作。作为一款车载控制器,特斯拉的自动驾驶域控制器还考虑到了紧急情况,因此配备了紧急呼叫音频接口,为此搭配了 TI 的音频放大器和故障 CAN 收发器。
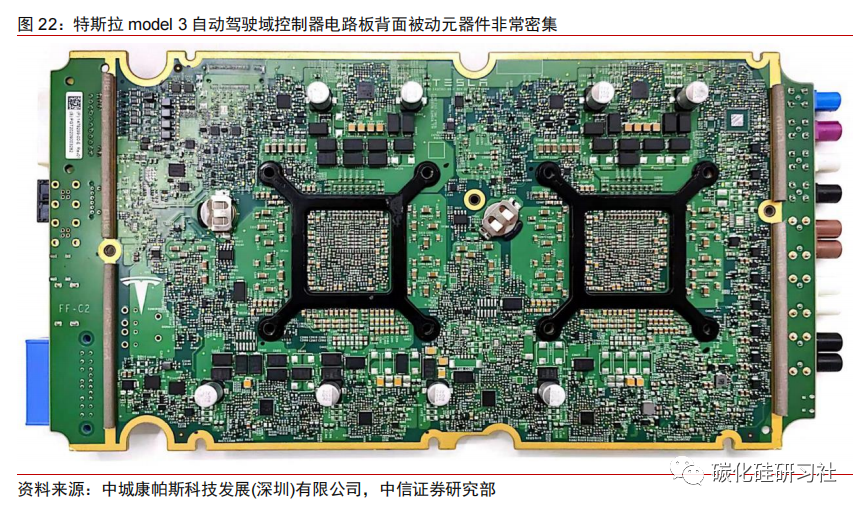
另外一点值得注意的是,为了保障驾驶安全,AP 控制器必须时刻稳定运行,因此特斯拉在 AP 控制器中加入了相当大量的被动元件,正面有 8 颗安森美的智能功率模块,并搭配大量的电感和电容。背面更为明显,在几乎没有太多控制芯片的情况下将被动元件铺满整个电路板,密度之高远超其他控制器,也明显高于生活中各种常见的智能终端。从这一点来看,随着智能汽车的发展,我国被动元器件企业也有望获益。
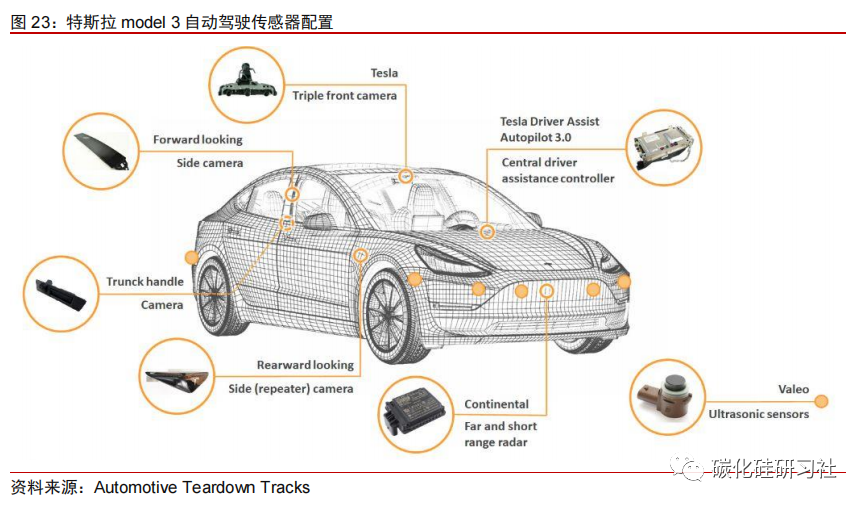
为了实现自动驾驶,特斯拉提出了一整套以视觉为基础,以 FSD 芯片为核心的解决方案,其外围传感器主要包含 12 个超声传感器(Valeo)、8 个摄像头(风挡玻璃顶 3 个前视,B 柱 2 个拍摄侧前方,前翼子板 2 个后视,车尾 1 个后视摄像头,以及 1 个 DMS 摄像头)、1 个毫米波雷达(大陆)。
其最核心的前视三目摄像头包含中间的主摄像头以及两侧的长焦镜头和广角镜头,形成不同视野范围的搭配,三个摄像头用的是相同的安森美图像传感器。
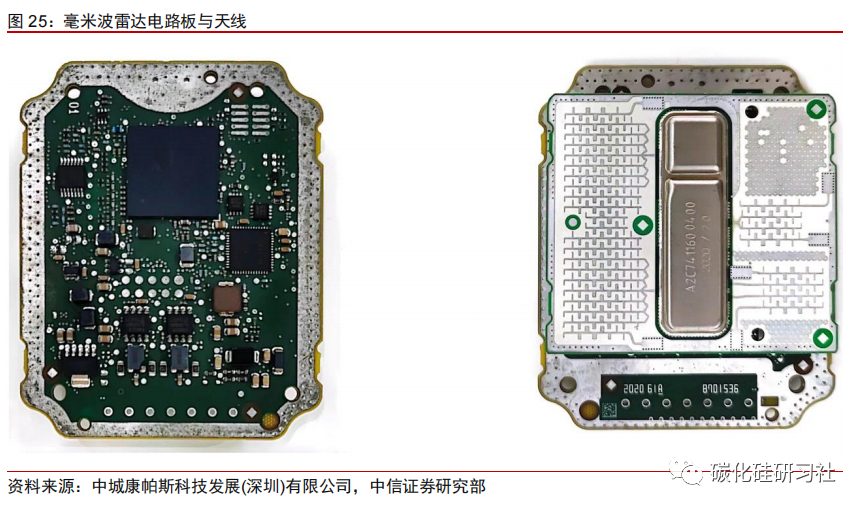
毫米波雷达放置于车头处车标附近,包含一块电路板和一块天线板。该毫米波雷达内部采用的是一颗 Freescale 控制芯片以及一颗 TI 的稳压电源管理芯片。
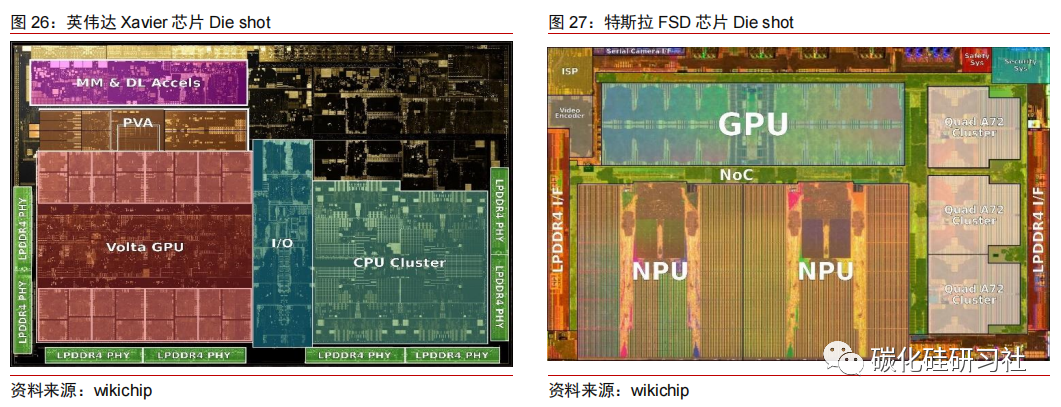
而整个 AP 控制器的真正核心其实就是 FSD 芯片,这也是特斯拉实现更高 AI 性能和更低成本的的一个重点。与当前较为主流的英伟达方案不同,特斯拉 FSD 芯片内部占据最大面积的并非CPU和GPU,而是NPU。虽然此类设计完全是为神经网络算法进行优化,通用性和灵活性相对不如英伟达的 GPU 方案,但在当前 AI 算法尚未出现根本性变化的情况下,NPU 的适用性并不会受到威胁。
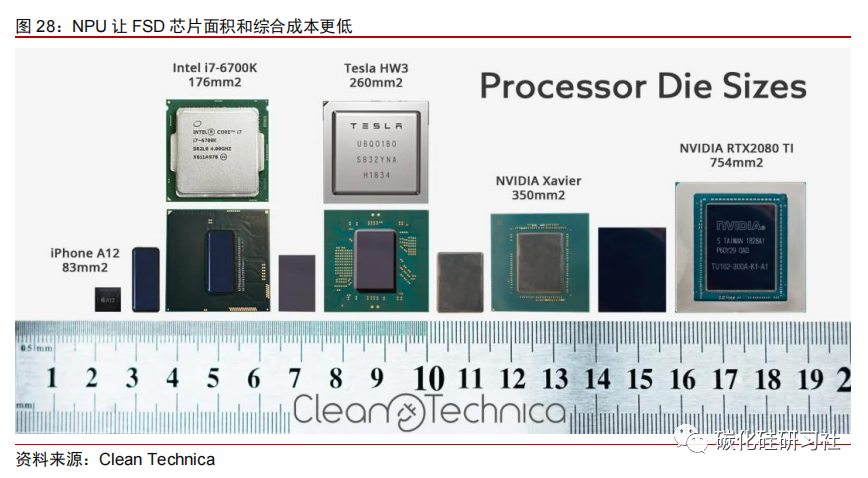
NPU 单元能够对常见视觉算法中的卷积运算和矩阵乘法运算进行有效加速,因此特斯拉 FSD 芯片能够使用三星 14nm 工艺,达到 144TOPS 的 AI 算力,而面积只有约 260 平方毫米。相比而言,英伟达 Xavier 使用台积电 12nm 工艺,使用 350 平方毫米的芯片面积却只得到 30TOPS 的 AI 算力。这样的差距也是特斯拉从 HW2.5 版本的英伟达 Parker SoC 切换到 HW3.0 的自研 FSD 芯片的原因。因此,在算法不发生根本性变革的情况下,特斯拉 FSD 能取得成本和性能的双重优势,这也构成了特斯拉自动驾驶方案的竞争力。
AI 算法方面,根据特斯拉官网人工智能与自动驾驶页面的描述,AutoPilot 神经网络的完整构建涉及 48 个网络,每天依据其上百万辆车产生的数据进行训练,需要训练 70000 GPU 小时。基础代码层面,特斯拉具备可以 OTA 的引导程序,还有自定义的 Linux 内核(具有实时性补丁),也有大量内存高效的低层级代码。 未来自动驾驶域的创新仍然会集中在芯片端,另外传感器的创新如激光雷达、4D 毫米波雷达等也能够很大程度上推动智能驾驶。在可见的未来,专用 AI 芯片将能够成为与英伟达竞争的重要力量,我国 AI 芯片企业有望借助智能汽车的东风获得更好发展。 座舱域:特斯拉更多将座舱视为 PC 而非手机 座舱域是用户体验的重要组成部分,特斯拉的座舱控制平台也在不断进化中。本次拆解的特斯拉model 3 2020款采用的是第二代座舱域控制器(MCU2)。 MCU2 由两块电路板构成,一块是主板,另一块是固定在主板上的一块小型无线通信电路板(图中粉色框所示)。这一块通信电路板包含了 LTE 模组、以太网控制芯片、天线接口等,相当于传统汽车中用于对外无线通信的 T-box,此次将其集成在 MCU 中,能够节约空间和成本。我们本次拆解的 2020 款 model 3 采用了 Telit 的 LTE 模组,在 2021 款以后特斯拉将无线模组供应商切换成移远通信。 MCU2 的主板采用了双面 PCB 板,正面主要布局各种网络相关芯片,例如 Intel 和Marvell 的以太网芯片,Telit 的 LTE 模组,TI 的视频串行器等。正面的另一个重要作用是提供对外接口,如蓝牙/WiFi/LTE 的天线接口、摄像头输入输出接口、音频接口、USB 接口、以太网接口等。 |